
@LIRA-Lab, University of Genoa, Italy
Our robotic setup called "Babybot" is an anthropomorphic machine with eyes (cameras), ears (microphones), a head, arm and torso, and a hand with tactile and proprioceptive sensing.
More information about our experimental setup can be found here and also on this document.
@UMR7593, CNRS, University Pierre & Marie Curie, Paris, France
Non-contingency teleprompter device generating a delayed communication of the mother. This latest implementation allows decoupling audio from video.
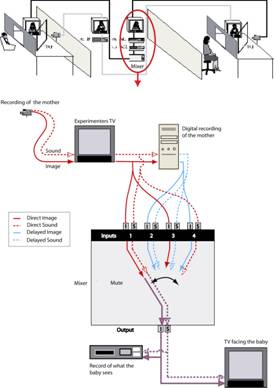
More information can be found on UMR7593 and also on this document.
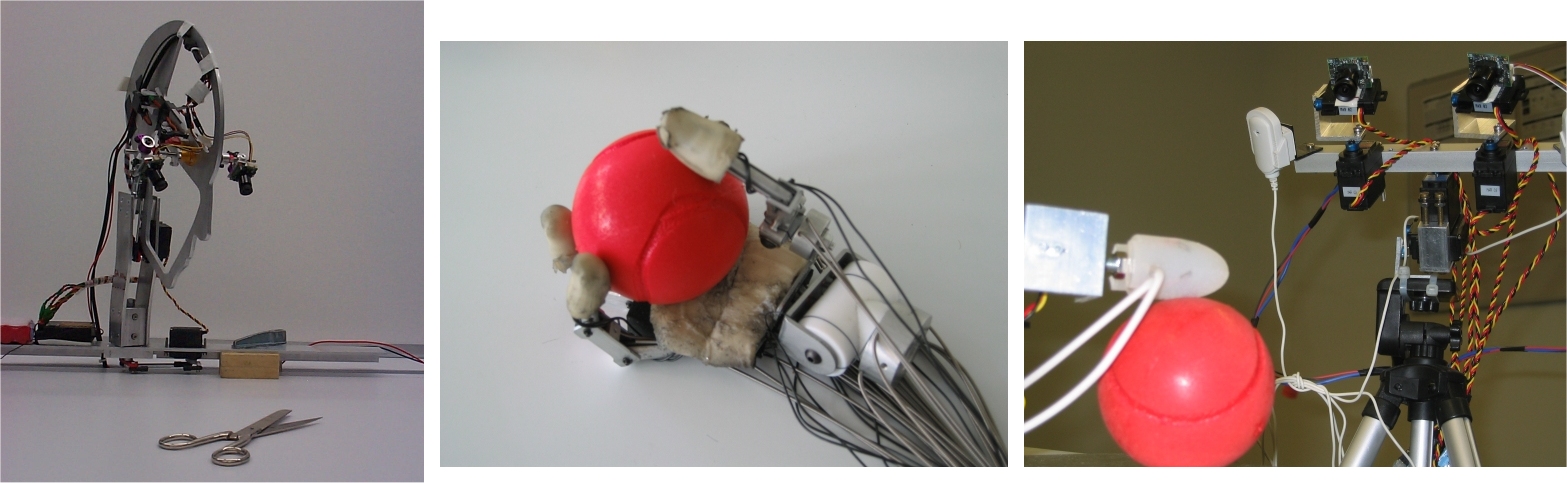
@AI-Lab, University of Zurich, Switzerland.
Various experimental setups for exploring the role of morphology in manipulation.
More information can be found following this link!