The
Eyes
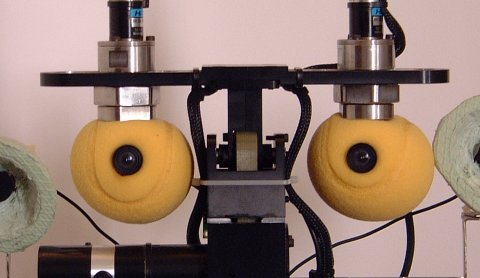
The Babybot's visual system though based on cameras contains a bit of biological inspiration. In fact, whenever we collect pixels from images, we sample them according to a distribution that mimics the actual distribution of photoreceptors in the human retina. There are more pixels in the central part of the image (fovea) and less and bigger receptors in the periphery. Mathematically the distribution is well approximated by a log-polar geometry.
Evolution shaped the human eye this way since a uniform resolution sensor (such as the conventional cameras) would require and incredible amount of processing power to deal with the incoming information. On the other hand, the log-polar sampling trades off the high accuracy of the fovea with the large field of view (with lower resolution).
We also designed and realized in hardware a CMOS camera with a log-polar distribution of pixels. This spurred a whole project in its own that you can find here.